Using Nx Meta with Drone Streams (RTMP/WebRTC) – Any Official Integration Approach?
Answered
Hi everyone,
I’m currently working on integrating drone video streams into Nx Meta and would appreciate guidance on the recommended or officially supported approach.
In our current setup:
- Drone streams are provided via RTMP
- Our AI system performs inference externally using the video stream
From what I understand, Nx Meta does support RTSP cameras.
My questions are:
- Is there any official or recommended way to integrate drone streams with Nx Meta?
- Are there any best practices for handling dynamic/unstable streams (such as drones) in Nx Meta?
- Would using Nx Metadata SDK or plugins be a better approach for this use case?
We are evaluating Nx Meta for production use in a drone-based monitoring system.
Any guidance, documentation, or recommended patterns would be highly appreciated.
Thanks in advance!
-

Hi
Thanks for your question.
Could you please clarify what you mean by “Nx Meta does support RTSP cameras”?
If you are referring to adding an RTSP stream into the Nx Media Server, then yes, this is supported as a standard feature. You can also find this documented in the user manual.
In such cases, the stream would be added via IP address, similar to how traditional cameras or devices are integrated into the system.
As an alternative, we are currently working with some partners on integration projects using a feature called Nx WebRTC Camera.
This feature establishes a WebRTC Tracker WebSocket connection. It follows the offer/answer model defined in RFC 3264, with WebSockets used as the transport layer. This approach is supported by most modern browsers based on Chromium or Gecko engines. This WebRTC Tracker is designed to receive video streams from a WebRTC camera. The Nx WebRTC Camera can be opened in a browser and can also be used to stream video directly from the browser into the server. Internally, the player utilizes this WebRTC Tracker endpoint for streaming.
Based on this architecture and feature, you may consider implementing your own middleware or application layer to convert or transfer your video stream into WebRTC. Once converted, the stream can be dynamically added and pulled by the media server.
Conceptually, this aligns with the diagram below, where your responsibility would be to implement the “Transfer into WebRTC” component (the blue block).
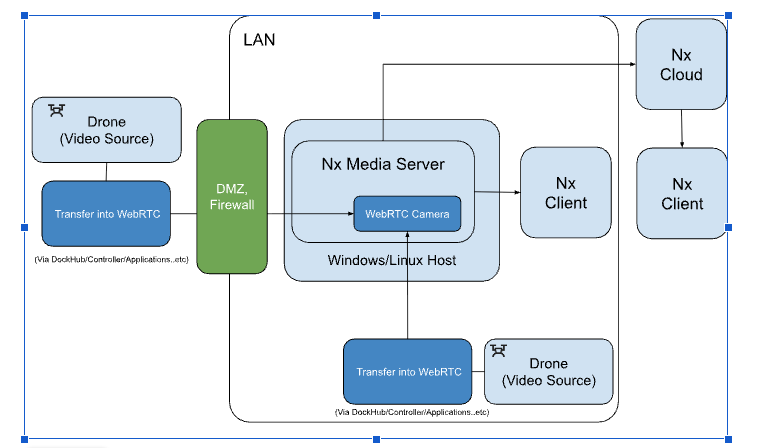
In most cases, drones themselves have limited capability to handle this type of processing. Therefore, it is typically necessary to perform the relay and conversion on a docking hub, PC, or another intermediary system.
Once this intermediary handles the video relay and converts the stream into WebRTC, you can register your application(or another intermediary system) as a device in the media server and leverage the Nx WebRTC Camera feature to ingest the stream.
We are aware that some drone manufacturers have already implemented similar solutions, and a few are currently working on this with Nx. In general, their approach involves developing an application (either a standalone app on android or a middleware on their docking hub) using their own SDK to retrieve video or frames from the drone in real time, convert the stream into WebRTC, and then feed it into the media server.
There is a preliminary document available for reference purposes only that you may refer to. Thanks for your understanding.
1 -
Ichiro Thanks for the detailed explanation, it really helped me understand the concept.
0
Please sign in to leave a comment.
Comments
2 comments